







Detailed Description:
-
High Power Drive Capability: With a rated current of 30A, it can drive high-power servo motors to meet the demands of heavy-load, high-torque output applications. It utilizes a high-performance Digital Signal Processor (DSP) to achieve fast and precise current, speed, and position loop control.
-
Comprehensive Control and Interfaces: Supports standard position, speed, and torque control modes. Equipped with Pulse Command Input and Analog Command Input interfaces, compatible with various master controllers. This model is typically designed to accept higher voltage level (e.g., 200V) analog or pulse commands from external sources for advanced motion control.
-
Built-in Dynamic Brake and Protection: The suffix “A” indicates a built-in Dynamic Brake, ensuring safe and rapid dissipation of regenerative energy generated during motor braking in emergency stops or system faults, enabling reliable stopping. It features comprehensive electronic protection functions including overcurrent, overvoltage, undervoltage, overheating, and overload protection to ensure system safety.
-
Robust Mechanical Construction: Designed specifically for high-current applications, it features a sturdy metal housing and an efficient heat dissipation structure (typically with a forced cooling fan), ensuring long-term operational stability and durability under high-load conditions.
-
Convenient Monitoring and Setup: The drive front panel is typically equipped with a digital display and operation keys for monitoring operating status (such as speed, current, alarm codes), performing basic parameter settings, and manual trial operation, facilitating on-site debugging and maintenance.
Key Specifications:
| Parameter | Details |
|---|---|
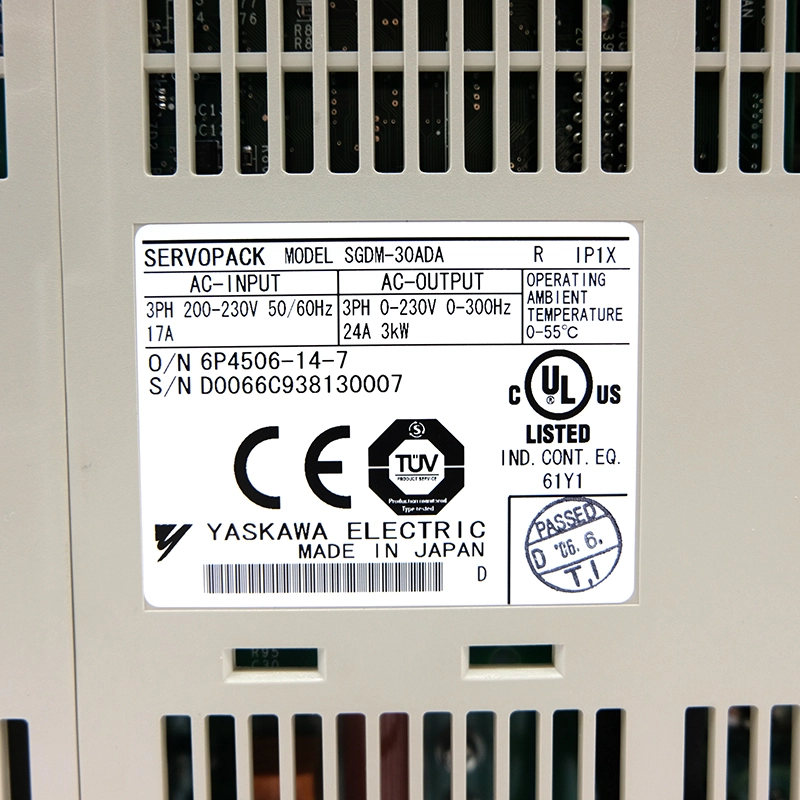
| Model | SGDM-30ADA |
| Series | Σ-II (Sigma-II) |
| Rated Output Current | 30.0 Arms |
| Maximum Output Current | 90.0 Arms (typical) |
| Power Supply Voltage | 3-phase 200 ~ 230V AC, 50/60 Hz |
| Main Circuit Power Connection | 3-phase (R, S, T) |
| Built-in Function | Dynamic Brake (DB) |
| Control Modes | Position Control, Speed Control, Torque Control |
| Command Input | Pulse Train Input, Analog Voltage Input (typical ±10V) |
| Feedback System | Compatible with Yaskawa Σ-II series high-resolution encoder servo motors |
| Main Protection Functions | Overcurrent, Overvoltage, Undervoltage, Overheating, Overload, Encoder Error, etc. |
| Cooling Method | Forced Air Cooling (built-in cooling fan) |
| Ambient Temperature | 0 ~ 55°C (operating) |
| Construction/Protection | Enclosed Chassis Mount Type (typically IP00, requires installation in a cabinet) |


















