











Detailed Description:
-
Reliable and Stable Control Performance: Utilizes Yaskawa’s proven servo control technology to provide smooth and responsive speed, torque, and position control. Features One-Touch Auto-Tuning for quick matching of motor and load characteristics, simplifying the setup process.
-
Flexible Command Input and Communication: Supports various control command input methods, including standard Pulse Train Input and Analog Voltage Input, allowing easy connection to PLCs or motion controllers. An optional MECHATROLINK-II (M-II) communication board enables high-speed multi-axis network control.
-
Built-in Dynamic Brake (DB): The suffix “A” in the model number indicates a built-in Dynamic Brake. During emergency stops, alarms, or power loss, it automatically engages a braking resistor to achieve quick and safe motor stopping, enhancing system safety and reliability.
-
Robust Industrial Design: Features a high-density, compact design. Equipped with robust protection functions such as overcurrent, overvoltage, undervoltage, overheating, and overload protection, ensuring long-term stable operation in harsh industrial environments.
-
Easy Operation and Maintenance: The drive front panel is equipped with a 5-digit LED display and simple operation keys for convenient status monitoring, parameter setting, trial operation, and fault diagnosis. The built-in alarm history function facilitates quick troubleshooting.
Key Specifications:
| Parameter | Details |
|---|---|
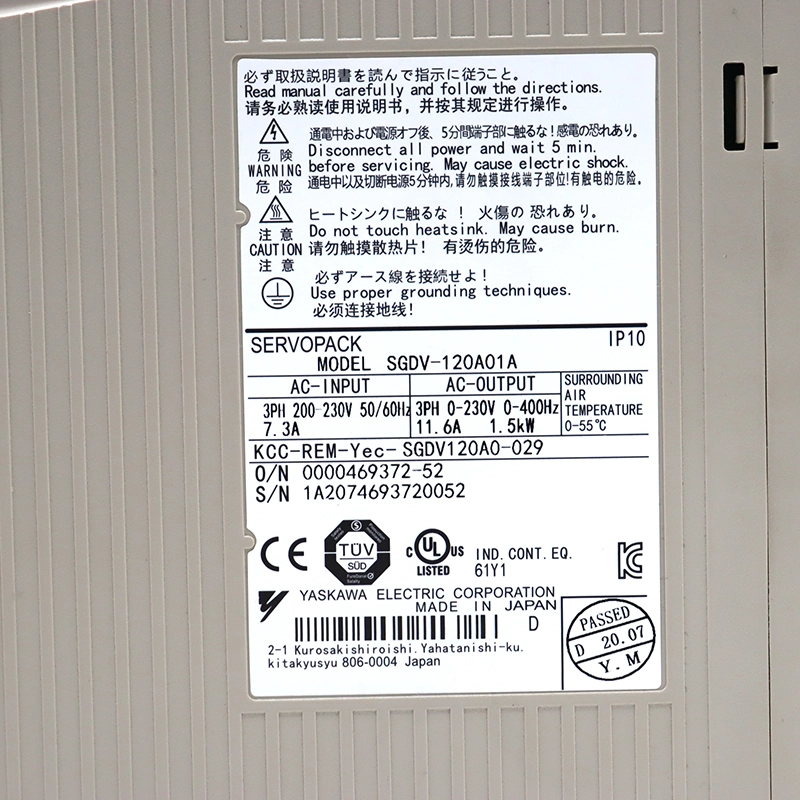
| Model | SGDV-120A01A |
| Series | Σ-V (Sigma-V) |
| Rated Output Current | 12.0 Arms |
| Maximum Output Current | 36.0 Arms |
| Power Supply Voltage | 3-phase 200 ~ 230V AC (+10%, -15%), 50/60 Hz |
| Main Circuit Power Connection | 3-phase (L1, L2, L3) |
| Built-in Function | Dynamic Brake (DB) |
| Control Modes | Position Control, Speed Control, Torque Control |
| Feedback System | Compatible with Yaskawa absolute encoder (16-bit/20-bit) servo motors |
| Standard Command Input | Pulse Train Input, Analog Voltage Input (±10V) |
| Network Communication | Requires optional MECHATROLINK-II communication board |
| Braking Method | Built-in Dynamic Braking (via DB resistor) |
| Protection Functions | Overcurrent, Overvoltage, Undervoltage, Overheating, Overload, Encoder Error, etc. |
| Ambient Temperature | 0 ~ 55°C (operating, non-freezing) |
| Construction | Open Type (IP20) |
| Mounting Orientation | Vertical Mounting (face forward) |


















